

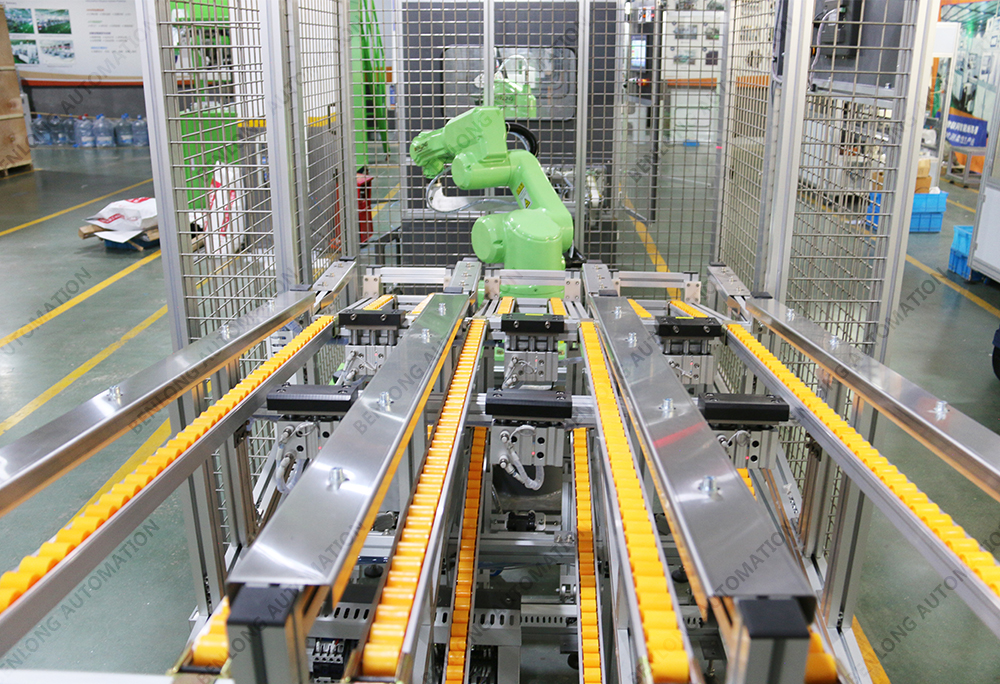
Aŭtomata ŝarĝado kaj malŝarĝado de robotoj por trotensioprotektiloj
Vidu Pli>>

1. Eniga tensio de la ekipaĵo 220V/380V ± 10%, 50Hz; ± 1Hz;
2. Aparataj kongruaj polusoj: 1P, 2P, 3P, 4P, 5P
3. Ritmo de ekipaĵoproduktado: 1 sekundo por polo, 1,2 sekundoj por polo, 1,5 sekundoj por polo, 2 sekundoj por polo, kaj 3 sekundoj por polo; Kvin malsamaj specifoj de ekipaĵo.
4. La sama ŝelkadra produkto povas ŝanĝi inter malsamaj polusaj numeroj per unu klako; Malsamaj ŝelkadraj produktoj postulas manan anstataŭigon de muldiloj aŭ fiksaĵoj.
5. La ekipaĵaj fiksaĵoj povas esti adaptitaj laŭ la produkta modelo.
6. Laseraj parametroj povas esti antaŭkonservitaj en la kontrolsistemo por aŭtomata retrovo kaj markado; La markaj QR-kodaj parametroj povas esti agorditaj arbitre, ĝenerale ≤ 24 bitoj.
7. La ekipaĵo havas alarmfunkciojn kiel ekzemple eraralarmon kaj premmonitoradon.
8. Ekzistas du operaciumoj haveblaj: la ĉina kaj la angla.
9. Ĉiuj kernaj akcesoraĵoj estas importitaj el diversaj landoj kaj regionoj kiel Italio, Svedio, Germanio, Japanio, Usono, Tajvano, ktp.
10. La aparato povas esti ekipita per funkcioj kiel ekzemple la "Sistemo por Inteligenta Energianalizo kaj Energiŝpara Administrado" kaj la "Platformo por Grandaj Datumoj pri Inteligenta Ekipaĵa Servo".
11. Havi sendependajn kaj sendependajn intelektajn proprietrajtojn





