

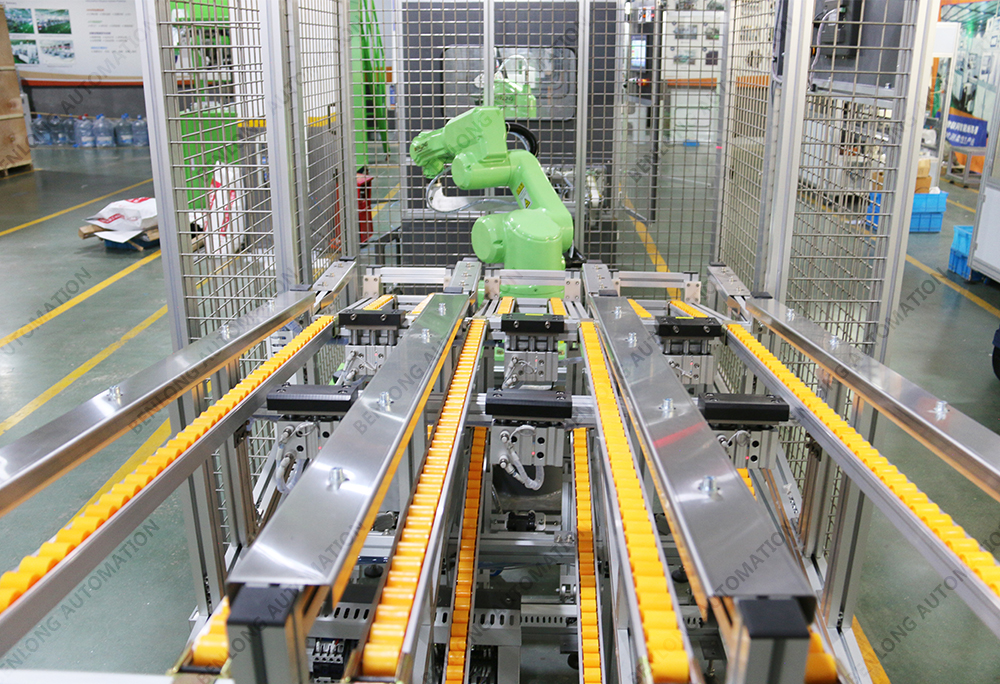
Goranzko babes-roboten kargatze eta deskargatze automatikoa
Ikusi gehiago >>

1. Ekipamenduaren sarrerako tentsioa 220V/380V ± % 10, 50Hz; ± 1Hz;
2. Gailuarekin bateragarriak diren poloak: 1P, 2P, 3P, 4P, 5P
3. Ekipamenduen ekoizpen-erritmoa: 1 segundo polo bakoitzeko, 1,2 segundo polo bakoitzeko, 1,5 segundo polo bakoitzeko, 2 segundo polo bakoitzeko eta 3 segundo polo bakoitzeko; Bost ekipamendu-zehaztapen desberdin.
4. Oskol-marko produktu berak polo-zenbaki desberdinen artean alda dezake klik bakarrarekin; Oskol-marko produktu desberdinek moldeak edo euskarriak eskuz ordezkatzea eskatzen dute.
5. Ekipamenduen elementuak produktuaren modeloaren arabera pertsonaliza daitezke.
6. Laser parametroak kontrol sisteman aurrez gorde daitezke berreskuratze eta markatze automatikoa egiteko; QR kodearen markaketaren parametroak nahi bezala ezar daitezke, oro har, ≤ 24 bit.
7. Ekipamenduak alarma-bistaratze funtzioak ditu, hala nola matxura-alarma eta presioaren monitorizazioa.
8. Bi sistema eragile daude eskuragarri: txinera eta ingelesa.
9. Osagarri nagusi guztiak hainbat herrialde eta eskualdetatik inportatzen dira, hala nola Italiatik, Suediatik, Alemaniatik, Japoniatik, Estatu Batuetatik, Taiwanetik, etab.
10. Gailua “Energia Adimendunaren Analisi eta Energia Kontserbatzeko Kudeaketa Sistema” eta “Ekipo Adimendunen Zerbitzu Datu Handien Hodeiko Plataforma” bezalako funtzioekin hornitu daiteke.
11. Jabetza intelektualaren eskubide independenteak eta independenteak izatea





