

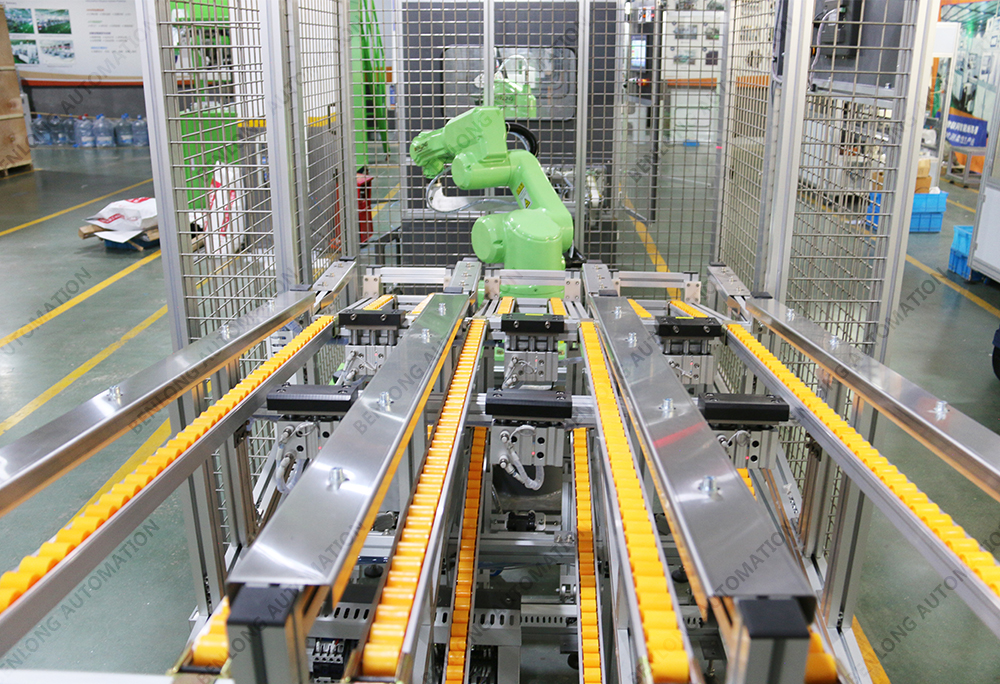
Անկայունության պաշտպանության ռոբոտների ավտոմատ բեռնում և բեռնաթափում
Տեսնել ավելին>>

1. Սարքավորման մուտքային լարում՝ 220V/380V ± 10%, 50Hz; ± 1Hz;
2. Սարքի հետ համատեղելի բևեռներ՝ 1P, 2P, 3P, 4P, 5P
3. Սարքավորումների արտադրության ռիթմը՝ 1 վայրկյան մեկ բևեռի համար, 1.2 վայրկյան մեկ բևեռի համար, 1.5 վայրկյան մեկ բևեռի համար, 2 վայրկյան մեկ բևեռի համար և 3 վայրկյան մեկ բևեռի համար։ Սարքավորումների հինգ տարբեր բնութագրեր։
4. Նույն շրջանակային արտադրանքը կարող է մեկ սեղմումով անցնել տարբեր բևեռների համարների միջև։ Տարբեր շրջանակային արտադրանքները պահանջում են կաղապարների կամ հարմարանքների ձեռքով փոխարինում։
5. Սարքավորումների հարմարանքները կարող են հարմարեցվել արտադրանքի մոդելին համապատասխան:
6. Լազերի պարամետրերը կարող են նախապես պահպանվել կառավարման համակարգում՝ ավտոմատ վերականգնման և նշագրման համար։ Նշման QR կոդի պարամետրերը կարող են սահմանվել կամայականորեն, ընդհանուր առմամբ ≤ 24 բիթ։
7. Սարքավորումն ունի տագնապի ցուցադրման գործառույթներ, ինչպիսիք են խափանման տագնապը և ճնշման մոնիթորինգը:
8. Հասանելի են երկու օպերացիոն համակարգեր՝ չինարեն և անգլերեն։
9. Բոլոր հիմնական պարագաները ներմուծվում են տարբեր երկրներից և տարածաշրջաններից, ինչպիսիք են Իտալիան, Շվեդիան, Գերմանիան, Ճապոնիան, ԱՄՆ-ն, Թայվանը և այլն:
10. Սարքը կարող է հագեցած լինել այնպիսի գործառույթներով, ինչպիսիք են «Խելացի էներգիայի վերլուծության և էներգախնայողության կառավարման համակարգը» և «Խելացի սարքավորումների ծառայության մեծ տվյալների ամպային հարթակը»։
11. Անկախ և անկախ մտավոր սեփականության իրավունքներ ունենալը





