

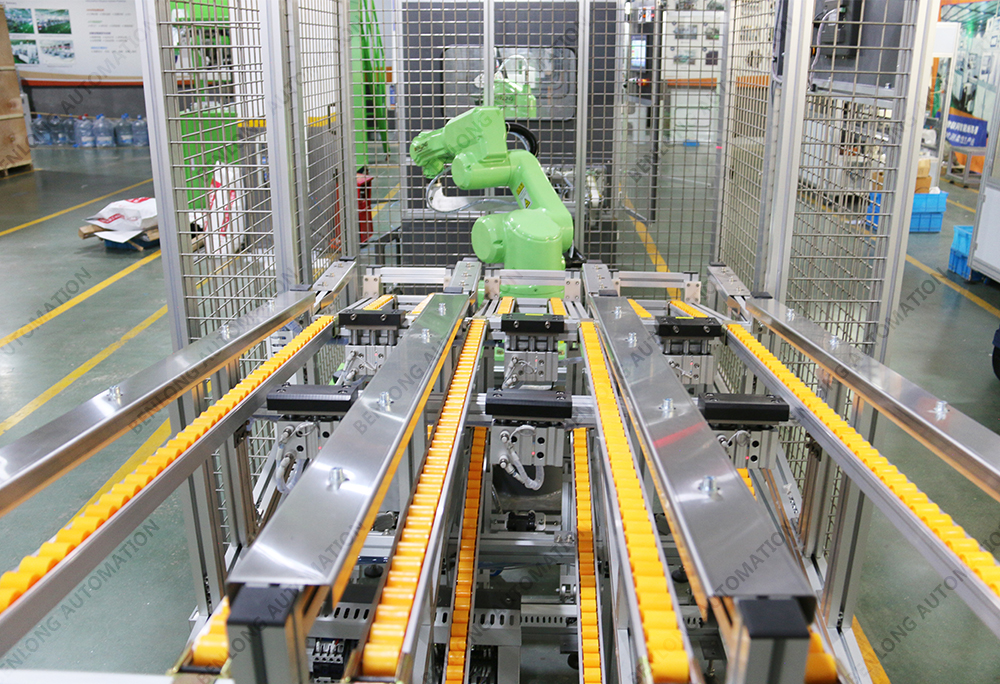
د سرج محافظ روبوټونو اتوماتیک بارول او پورته کول
نور وګورئ>>

۱. د تجهیزاتو د ننوتلو ولتاژ ۲۲۰V/۳۸۰V ± ۱۰٪، ۵۰Hz؛ ± ۱Hz؛
2. د وسیلې سره مطابقت لرونکي قطبونه: 1P، 2P، 3P، 4P، 5P
۳. د تجهیزاتو د تولید تال: په هر قطب کې ۱ ثانیه، په هر قطب کې ۱.۲ ثانیې، په هر قطب کې ۱.۵ ثانیې، په هر قطب کې ۲ ثانیې، او په هر قطب کې ۳ ثانیې؛ د تجهیزاتو پنځه مختلف مشخصات.
۴. د ورته شیل چوکاټ محصول کولی شي په یو کلیک سره د مختلفو قطبونو شمیرو ترمنځ بدل شي؛ د شیل چوکاټ مختلف محصولات د مولډونو یا فکسچرونو لاسي ځای په ځای کولو ته اړتیا لري.
5. د تجهیزاتو فکسچر د محصول ماډل سره سم تنظیم کیدی شي.
۶. د لیزر پیرامیټرونه د اتوماتیک ترلاسه کولو او نښه کولو لپاره د کنټرول سیسټم کې دمخه زیرمه کیدی شي؛ د نښه کولو QR کوډ پیرامیټرونه په خپل سر تنظیم کیدی شي، عموما ≤ ۲۴ بټونه.
۷. تجهیزات د الارم ښودلو دندې لري لکه د خطا الارم او د فشار څارنه.
۸. دوه عملیاتي سیسټمونه شتون لري: چینایي او انګلیسي.
۹. ټول اصلي لوازم له مختلفو هیوادونو او سیمو لکه ایټالیا، سویډن، جرمني، جاپان، متحده ایالاتو، تایوان او نورو څخه واردیږي.
۱۰. دا وسیله د "سمارټ انرژۍ تحلیل او د انرژۍ ساتنې مدیریت سیسټم" او "سمارټ تجهیزاتو خدماتو لوی ډیټا کلاوډ پلیټ فارم" په څیر دندو سره سمبال کیدی شي.
۱۱. د خپلواک او خپلواک فکري ملکیت حق درلودل





