

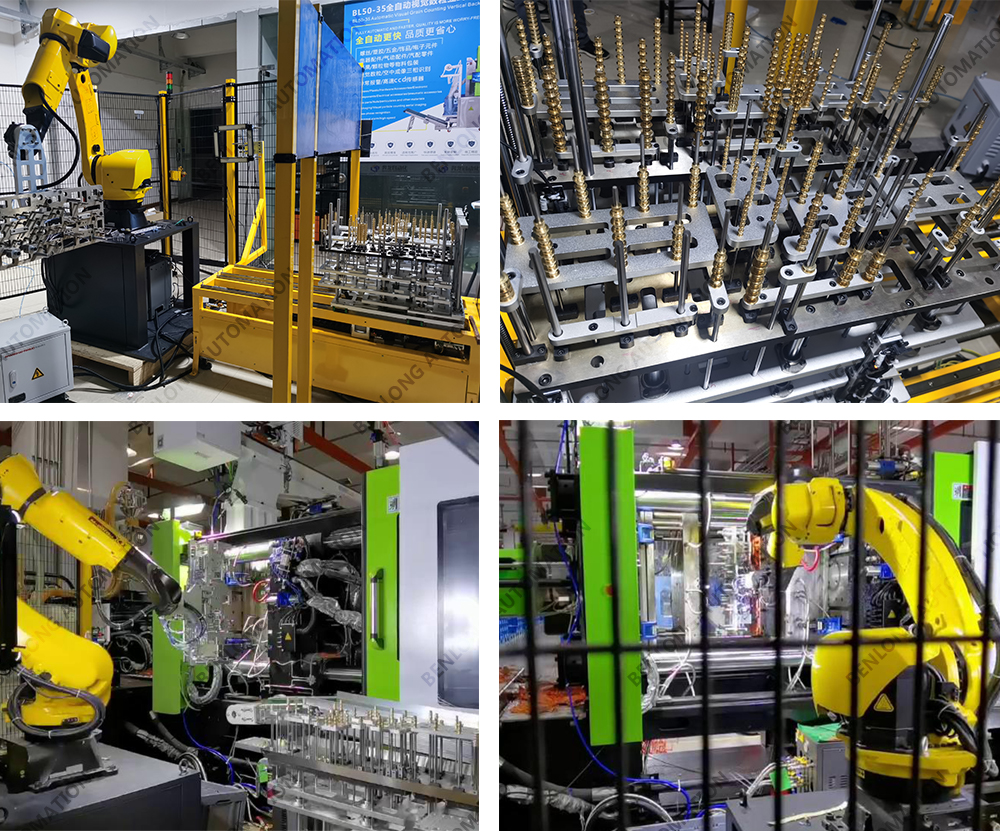
ロボットインサートの自動ロードとアンロード
続きを見る>>
1.機器入力電圧:380V ± 10%、50Hz; ± 1Hz;
2. 設備の互換性と生産効率:顧客の要件に応じてカスタマイズできます。
3. 組み立て方法: さまざまな製造プロセスと製品の要件に応じて、製品の自動組み立てを実現できます。
4. 設備の取付具は製品モデルに応じてカスタマイズできます。
5. 本装置は、故障警報や圧力監視などの警報表示機能を備えています。
6. 利用できるオペレーティング システムは中国語と英語の 2 種類です。
7. コアアクセサリはすべて、イタリア、スウェーデン、ドイツ、日本、米国、台湾などのさまざまな国や地域から輸入されています。
8. 「スマートエネルギー分析・省エネ管理システム」や「スマート設備サービスビッグデータクラウドプラットフォーム」などの機能を搭載できます。
9. 独立した独立した知的財産権を有する。
ここにメッセージを書いて送信してください





