

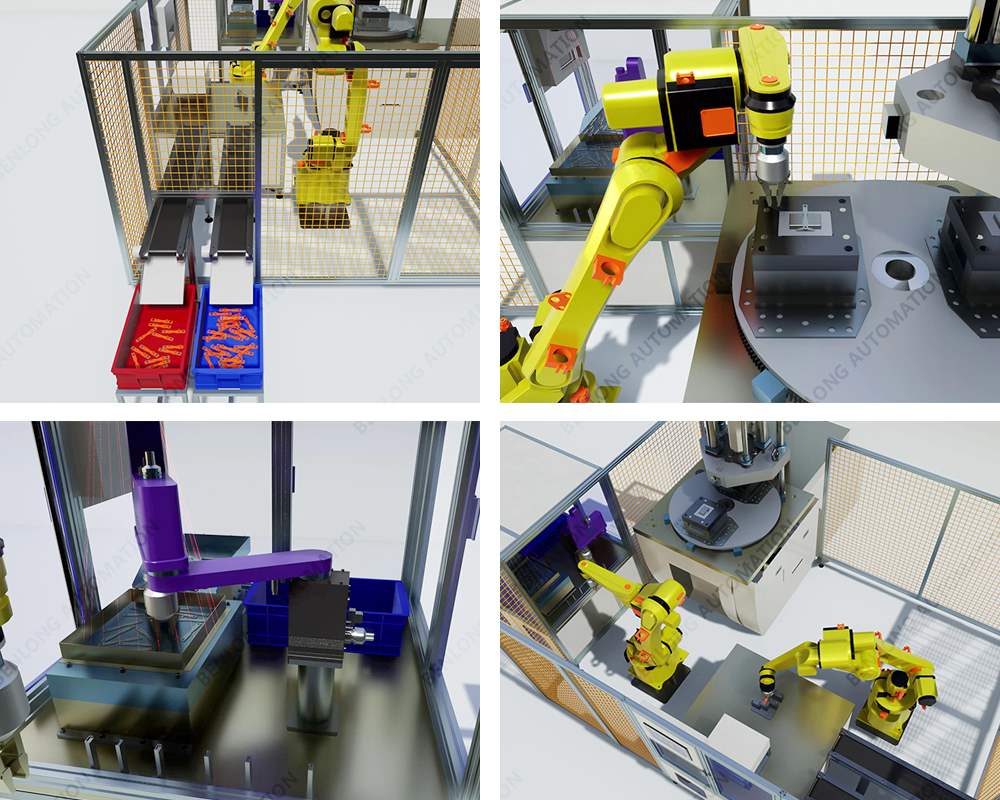
ロボット電極の自動積み込みと積み下ろし
続きを見る>>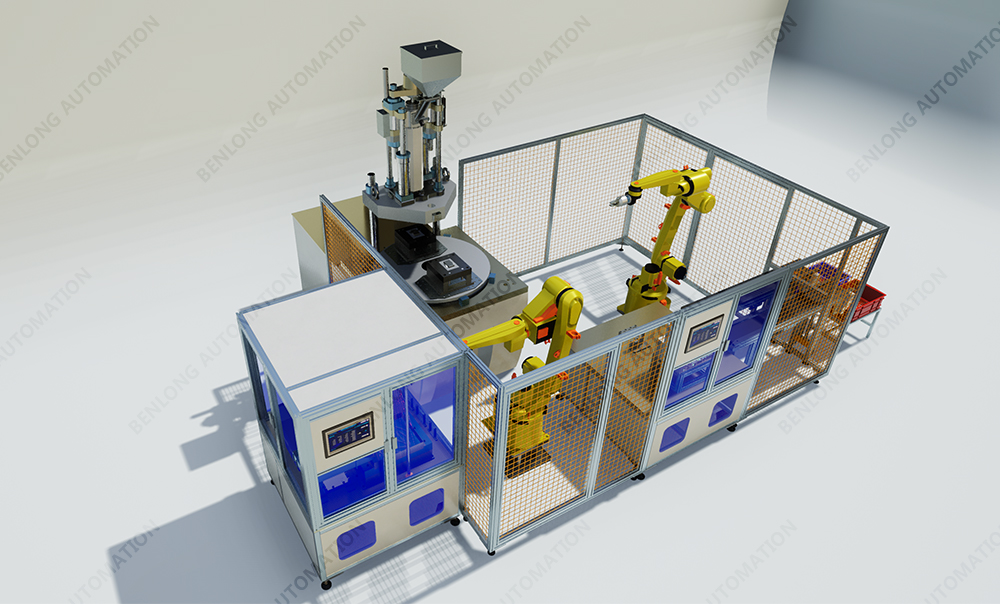
1.機器入力電圧:220V ± 10%、50Hz; ± 1Hz;
2. デバイス対応ポール:1P+モジュール、2P+モジュール、3P+モジュール、4P+モジュール。
3. 機器の生産リズム:1ポールあたり10秒以内。
4. 同じ棚製品を 1 回のクリックまたはスキャンコードで異なるポール間を切り替えることができます。
5. 包装方法:手動包装と自動包装を自由に選択して組み合わせることができます。
6. 設備の取付具は製品モデルに応じてカスタマイズできます。
7. 本装置は、故障警報や圧力監視などの警報表示機能を備えています。
8. 利用できるオペレーティング システムは中国語と英語の 2 種類です。
9. コアアクセサリはすべて、イタリア、スウェーデン、ドイツ、日本、米国、台湾などのさまざまな国や地域から輸入されています。
10. 「スマートエネルギー分析・省エネ管理システム」や「スマート機器サービスビッグデータクラウドプラットフォーム」などの機能を搭載できます。
11. 独立した知的財産権を有する
ここにメッセージを書いて送信してください





